Esta semana foi dedicada, maioritariamente, à escrita da dissertação: agradecimentos, resumo/abstract, conclusões e trabalho futuro, bem como a conclusão do capítulo 7 (‘’Cinemática integrada’’) .
Para além do que já foi referido no blog, durante esta semana foi introduzido, no cap.7, o conceito de manipulabilidade e foram obtidos gráficos da sua evolução ao longo da trajétoria. Simultaneamente, foi introduzida mais uma trajetória para a analise dos modelos cinemáticos propostos , na qual o objetivo era simular uma pintura de uma onda sinosoidal numa parede de 5m.
Apresenta-se as representações ilustrativas de cada movimento:
Abordagem 1
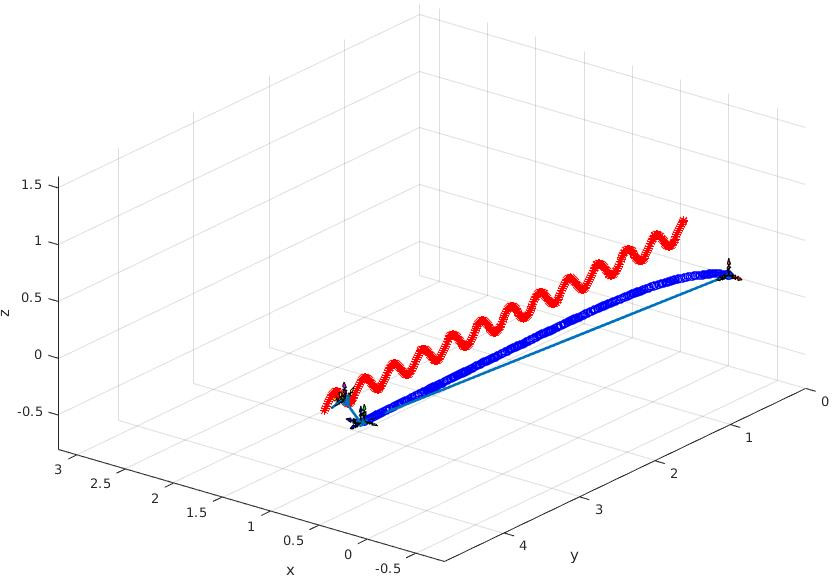
Contudo, constatou-se que a utilização da generalização do conceito de manipulabilidade de manipuladores fixos para manipuladores móveis não é apropriada. Deste modo optou-se por analisar a manipulabilidade do braço robótico ao longo da trajetória ao invés do sistema total. A abordagem anterior, utilizada para o cálculo do jacobiano , revelou-se não funcional para os termos de descrição das velocidades angulares. Assim, foi necessário reformular a metodologia de obtenção do jacobiano, utilizando outra abordagem: